Inwiefern ist die Anwendung der „Theory of Mind“ in der Robotik umsetzbar und auch sinnvoll?
In meinem Studium der Humanoiden Robotik an der Beuth Hochschule habe ich in einem Modul mit den Grundlagen der Robotik beschäftigt und sollte als Prüfungsleistung eine Präsentation zum Thema Humanoide Robotik und Anwendungsbeispielen aus Publikationen halten. Da ich mich sehr für die Interaktion zwischen Mensch und Roboter, aber auch die Nachahmung des menschlichen Verhaltens interessiere, haben meine Partnerin und ich uns für die Publikation „Theory of Mind for a Humanoid Robot“ aus dem Jahr 2002 von Brian Scassellati entschieden. Hier geht es um die Entwicklung eines Roboters, dem das menschliche Verhalten durch die Anwendung der Theory of Mind beigebracht wird.
Dabei muss natürlich zu Beginn der Begriff der Theory of Mind definiert werden. Nach dem Lexikon der Psychologie des Dorsch Verlages, beschreibt die „Theory of Mind […] die Vorhersage von Handlungen anderer Personen aufgrund von Informationen über deren Absichten und Ziele einerseits und deren Überzeugungen und Glauben andererseits. Eine Grundvoraussetzung der ToM ist die Erkenntnis, dass es einen mentalen Bereich gibt und die Unterscheidung und Abgrenzung dieses Bereichs von der physikal. Realität.“. In seiner Publikation bezieht sich Scassellati auf die Modellierungen von den Psychologen Alan M. Leslie und Simon Baron-Cohen.
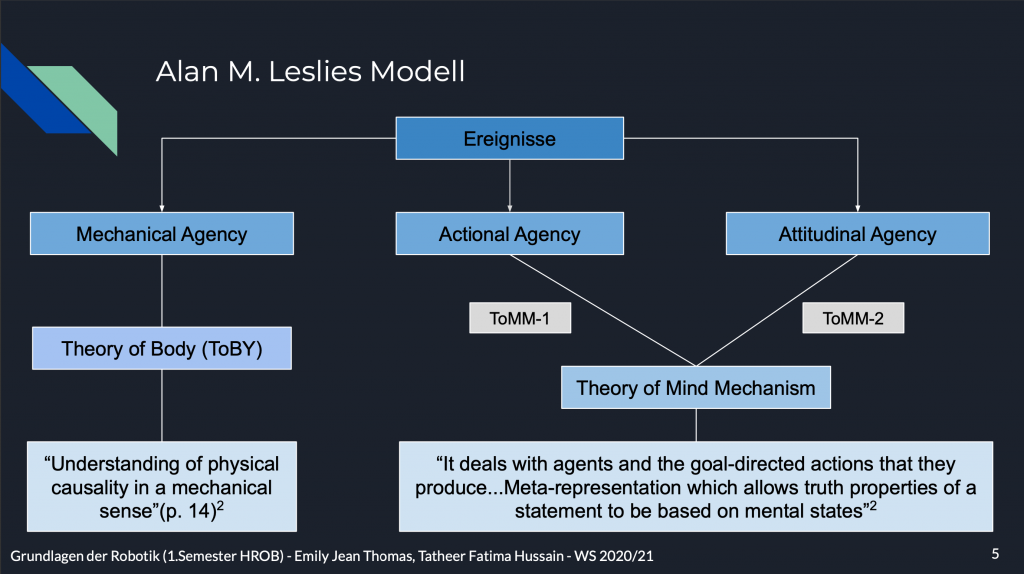
Leslie definiert die Geschehen der Welt in drei Klassen, aus denen sich die Bestandteile seiner Ausarbeitung der Theory of Mind bilden.
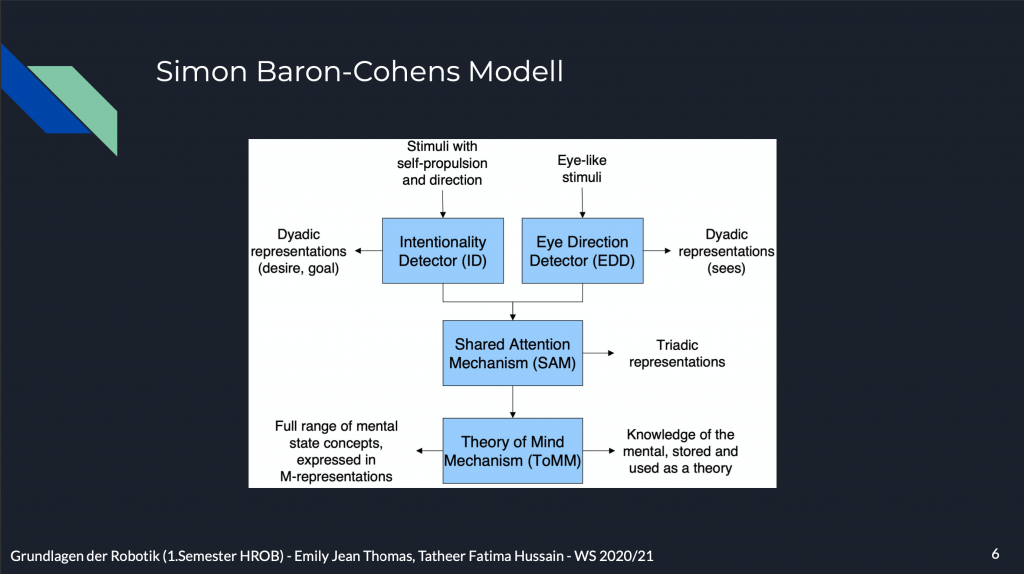
Im Gegensatz dazu unterscheidet Baron-Cohen anhand der Art der Stimulation und des Aufnahmekanals.
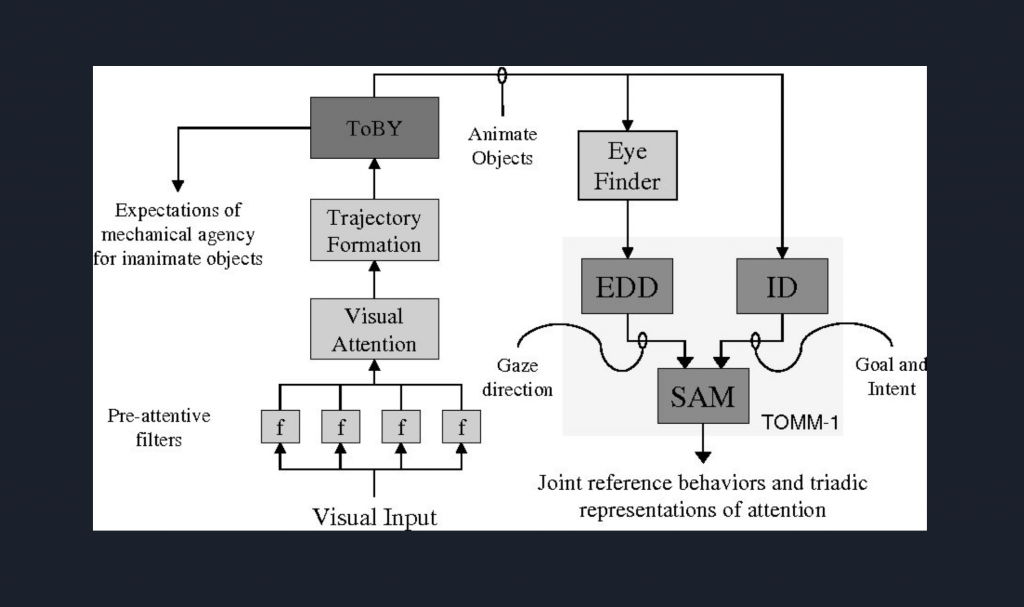
Diese Ansätze der Psychologen versucht Scassellati zu kombinieren, um eine perfektionierte Theory of Mind aufzustellen, die auch bei seinem Roboter „Cog“ umsetzbar ist.
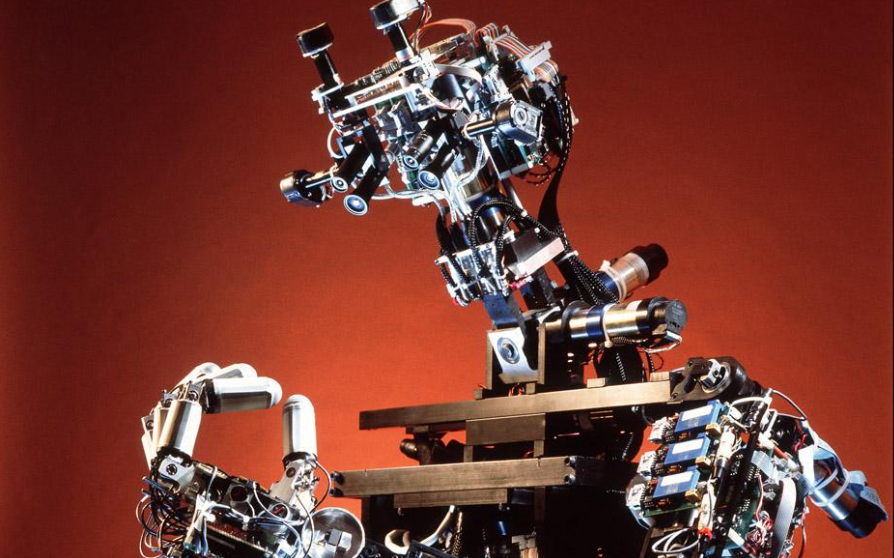
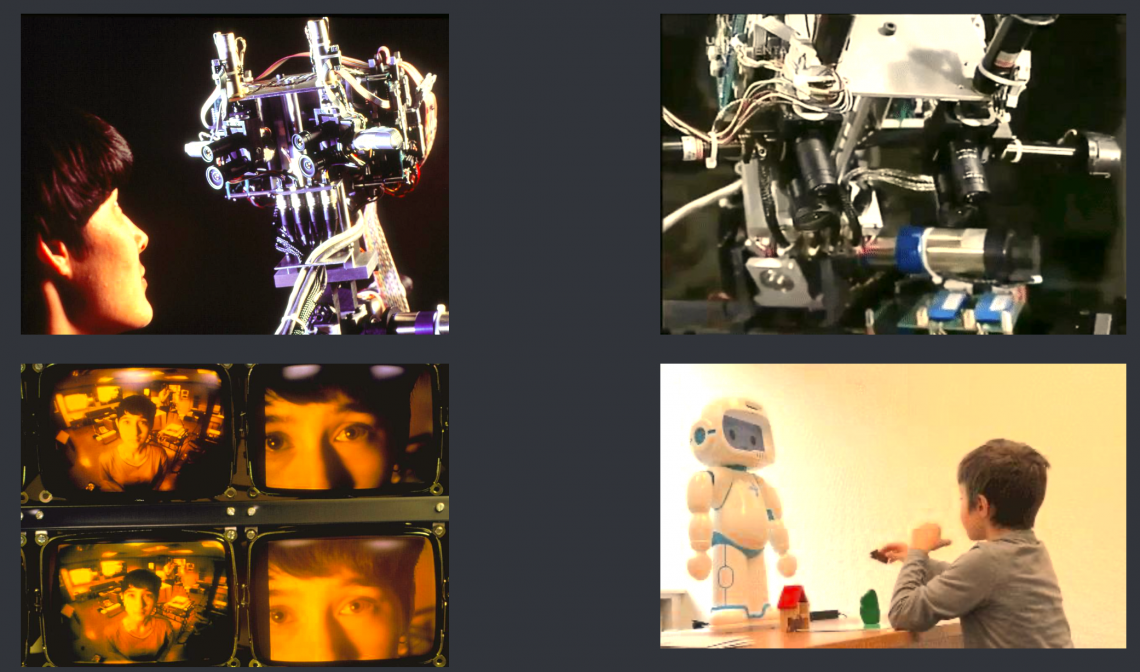
Dieser Roboter dient ausschließlich für die Realisierung von menschenähnlichem Verhalten weshalb auf Beine verzichtet wurde. Insgesamt hat er 22 Freiheitsgrade und ist mit einer Reihe von Sensoren wie zwei Kameras pro Auge, zwei Mikrofonen und Druck- und Wärmesensoren ausgestattet. Damit soll das Verhalten des Interaktionspartners erkannt und ausgewertet werden, sowie eine passende Reaktion erfolgen können.
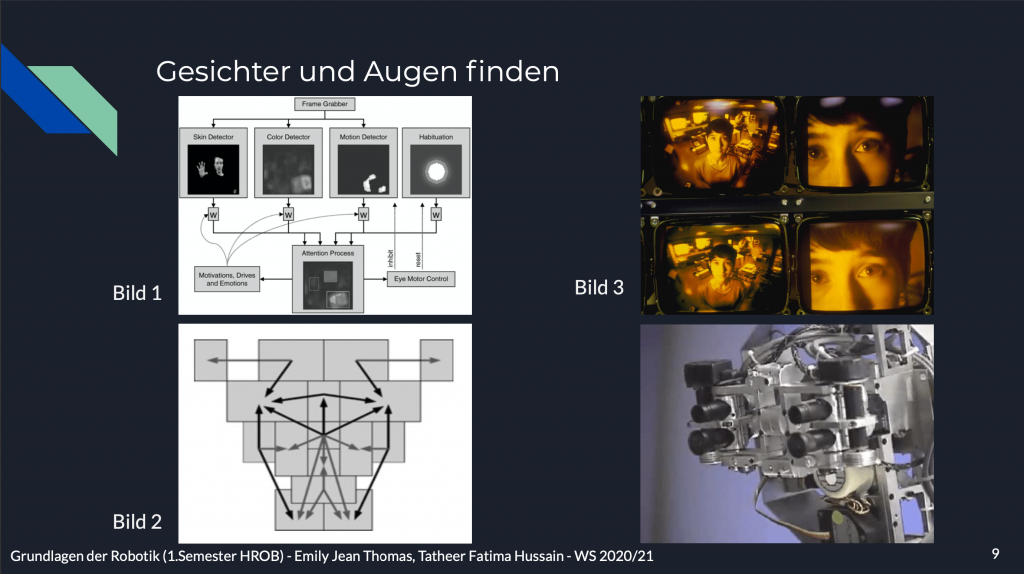
Dabei liegt der Schwerpunkt des Projektes bei der Realisierung von Gesichts- und Augenerkennung und der ansatzweisen Unterscheidung zwischen Mensch und Objekt.

Während Gesicht und Auge über die Kameras mit Frames gefunden werden können, stellt die Unterscheidung von menschlich und nicht menschlich eine große Herausforderung dar. Scassellati verwendet dafür einen Multiple-Hypothesis-Tracking-Algorithmus. Dieser bildet und liefert die Voraussetzung für die Modellierungen der Theory of Mind und bildet eine Trajektorie, also einen Raumkurvenverlauf, aus dem Stimuli der Image Frames. Der Algorithmus läuft über zwei Phasen ab, wobei sich die erste mit der räumlich-zeitlichen Merkmale aus den Images fokussiert und die zweite Phase zur Erkennung der äußeren Merkmalen wie Farbe oder Form eines Objektes dient. Aus den identifizierten Merkmalen soll eine Trajektorie gebildet werden, die die Bewegung eines einzelnen Objektes im Sichtfeld identifizieren soll. Dabei stößt er jedoch auf das Problem, dass Objekte oft bei Bewegung aus dem Blickfeld des Roboters verschwinden und die Anzahl der Targets für die Bildung der Trajektorien enorm schwankt. Um dennoch die Trajektorien zuvervollständigen ergänzt er die Frames um sogenannte Phantom Points, die undefiniert sind und durch Hypothesen angebunden werden. Diese Entwicklung hat einen Einfluss auf die Phasen des Algorithmus, da nun die erste Phase auch zur Distanzberechnung der Punkte verwendet werden kann und die zweite Phase Objekteigenschaften erkennen kann. Dies liefert dann die Parameter für die Unterscheidung zwischen Mensch und Objekt.
Diesen Ansatz sowie eine Blickverfolgung und hinweisende Gesten sieht Scassellati als mögliche Fortführungsideen für das Projekt. Bei allen bisherigen Anwendungen handelt es sich jedoch nur um Verhaltensweisen, die der Mensch als Säugling lernt zubeherrschen und zuverfeinern. Entsprechend wir die Publikation auch von späteren Arbeiten als Pionierarbeit und „Proof of Concept“ eingeordnet.
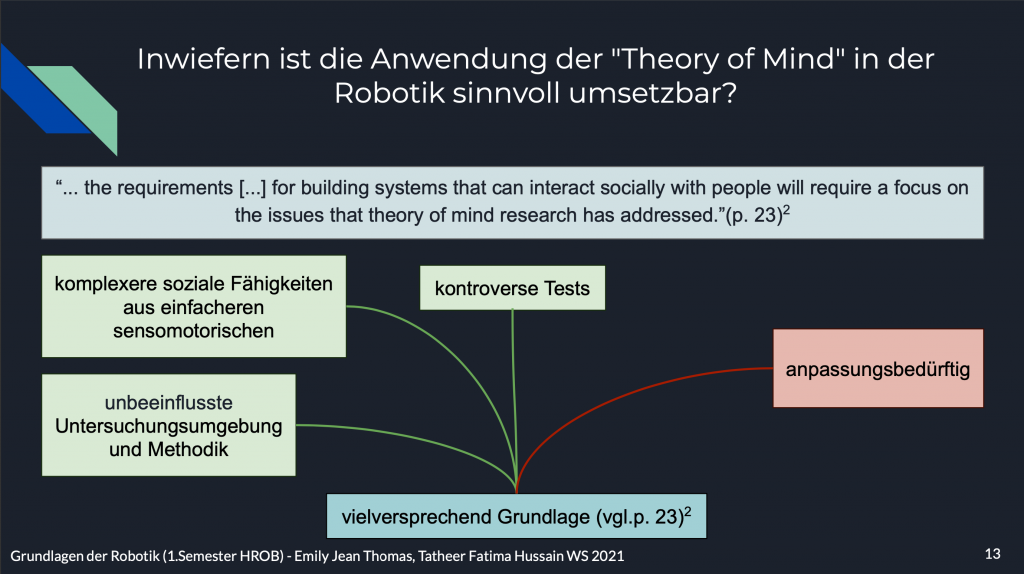
Zusammenfassend lässt sich sagen, dass aus Scassellati Arbeit hervorgeht, dass die Anwendung der Theory of Mind seiner Meinung nach eine vielversprechende Grundlage bildet, wobei aus heutiger Sicht jedoch die Anwendung zu viele Grundvorraussetzungen fordert und somit heute nicht mehr effizient funktioniert. Zudem ist die Theory of Mind auf das menschliche Lernverhalten zugeschnitten, weshalb einige Wissenschaftler auch eine eigene Theorie für den Roboter als sinnvollere Grundlage für die Verhaltensrealisierung sehen.
Falls ihr nochmal die Publikation lesen wollt oder euch die Präsentation angucken wollt, findet ihr am Ende hier die Datei, die auch die Quellen für unsere Arbeit enthält. Außerdem würde ich mich über eure Meinung zu der Publikation sehr freuen und auch allgemein, wie ihr zum Thema menschliches Verhalten bei einem Roboter steht.
